��RV8803-Raspi��������xRTC���W���[�����
�E����±3.88�b�ȓ��i��0�`50���j�^����±7.78�b�ȓ��i��-40�`85���j
�E�o�b�N�A�b�v�ꎟ�d�r���ځE�����ݒ�ς�
 �������xRTC���W���[�� RV-8803-C7 �𓋍ڂ������^�̃u���[�N�A�E�g��ł��B
�������xRTC���W���[�� RV-8803-C7 �𓋍ڂ������^�̃u���[�N�A�E�g��ł��B
���ȒP�Ȑݒ�̂� ��RaspberryPI�̍����x�ȊO�t����HWCLOCK�Ƃ��Ă����g�������܂��B
��RV-8803-C7 ��p�����A�v���P�[�V�����̊J�����̂��Q�l�p�Ƃ��Ă����p�����܂��B

 �` ���ڂ̍����x���A���^�C���N���b�N���W���[���̐��i��� �`
�` ���ڂ̍����x���A���^�C���N���b�N���W���[���̐��i��� �`
�@�����x���x�⏞���A���^�C���N���b�N���W���[���i�����U���q�����j
�@RV-8803-C7 �̏ڍd�l�͂����炩��
�E���̃{�[�h�̏o���̐ݒ� ↓�@�@
�E��H�ڑ��} ↓�@�@
�E���Y�p�C�ւ̐ݒ� ↓ �@
�E�R�}���h���t�@�����X ↓
�@ �d�r������������ݒ肵����Ԃŏo�ׂ���Ă��܂�
(1) �o�b�N�A�b�v�d�r���� ..... �o����CR1025 �E���`�E���{�^���d�r�𓋍ڂ��Ă��܂��i�ꎟ�d�r�j
�@ →�@�o�b�N�A�b�v�ꎟ�d�r�̎������Ԃɂ���
(2) �I�t�Z�b�g�ݒ�̂��� �N���b�N�o�͂��w1Hz�x�ɐݒ� ���܂��B
�@→ CLOCK�o�͂͊���O/E�[�q���v���_�E������Ă��邽�ߑҋ@���͏o�́w�I�t�x�ɂȂ�
�@�@ ����d����}���܂��B→ RV-8803-C7 �̏���d���ɂ���
(3) ������ł̑���l������1PPS�I�t�Z�b�g�ݒ�l����������
�@→ �d�r���ڍς̂��߃I�t�Z�b�g�����l�͎���d�r�������܂Ŏc��܂��B
(4) �����������ݐݒ� ( sudo hwclock -w �̃R�}���h���g�p�j
→ �o����UTC���� = ���{����+9���� �ɐݒ肳��Ă��܂��B
�@�@���Y�p�C�̃^�C���]�[���ݒ肪�w�����x�ɂȂ��Ă���Γ��{�̎������\������܂��B
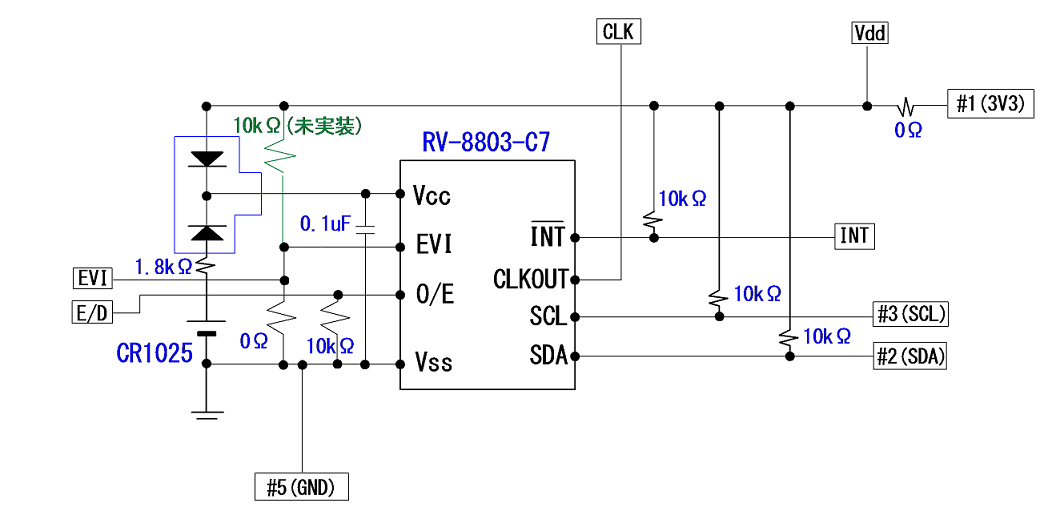
�A ��H�ڑ��}
 �i�N���b�N�Ŋg�債�܂��j
�i�N���b�N�Ŋg�債�܂��j
�E�w SCL / SDA / INT�[�q�x�� ���� Vdd�փv���A�b�v����Ă��܂��B
�E�wCLKOE �[�q�x�� ���̃{�[�h�ł́w10kΩ�x�ɂ� GND�փv���_�E������Ă��܂��B
�@*���ۂ̃A�v���P�[�V�����ŃN���b�N�o�͂��g�p���Ȃ��ꍇ�ɂ�CLKOE�[�q�͒���GND�ڑ����ĉ������B
�E�wEVI�[�q�x�͎q�̃{�[�h�ł̓f�t�H���g�ł� 0Ω�� GND�ɒZ�����Ă��܂��B
�@EVI�[�q���g�p����ꍇ�͒Z����R���O���Ė����������Ƀv���A�b�v��R(10kΩ)���������ĉ������B
�@�@*���ۂ̃A�v���P�[�V�����ł����̒[�q�̓I�[�v���ɂ͂��Ȃ��ʼn������B
�E �w�b�h�s����Vdd��+5V����������ꍇ�� �w#1�F3v3�x�Ƃ̊Ԃɂ��� 0Ω �����O���Ă��g�p�������B
�E �p�s���\�P�b�g�� #4�[�q�� NC�ł��i�����ڑ������j�B
�E �d���ؑ֗p�̃_�C�I�[�h�́wBAS70-05�x(Vishay, Diodes �� )���g�p���Ă��܂��B
�B RaspberryPI* �� HWCLOCK �ɐݒ肷����@
�� �ݒ���@�͈ȉ���2�ʂ肪����܂��B(1) �� �w /boot/config.txt�x�ɐݒ���L�q������@���ȒP�ł��B
�i�ŐV��RaspberryPI��OS�i���Y�r�A���j�� RV-8803-C7 �̃h���C�o���g�ݍ��܂�Ă��邽�߃��i�b�N�X�h���C�o�̃r���h���s�v�ł��j
�@�@ RaspberryPI* �� I2C�ʐM���w�L���x�ɂ��܂� �@�A �wsudo pcmanfm�x �̃R�}���h�����s�i�Ǘ��Ҍ����Ńt�@�C���}�l�[�W�����J���j �@�B ���Y�p�C�̐ݒ�t�@�C�� �w /boot/config.txt�x���J���A�����Ɉȉ��̋L�q��lj����ĕۑ����܂� �@�@�w dtoverlay=i2c-rtc,rv8803 �x �@�C �B�̌��OS���ċN������� RV-8803-C7 ��HWCLOCK �ɐݒ肳��܂� �@�D ������HWCLOCK�ɐݒ肳��Ă��邩�̊m�F �@�@ RV8803-Raspi ��ڑ�������Ԃɂ� �wsudo i2cdetect -y 1�x�̃R�}���h (I2C�̐ڑ��m�F�j �@�@�ɂ� 0x32�A�h���X�� "UU" �̕\�����o�Ă���� �������ݒ肳��Ă��܂��B �@�i�wsudo hwclock -r �x�̃R�}���h�𑗂��RTC�����̎�����Ԃ��Ă��܂� �j ����x �w /boot/config.txt�x�ɐݒ����������́A�d���I�t���čċN�����Ă��ݒ肪�c�邽��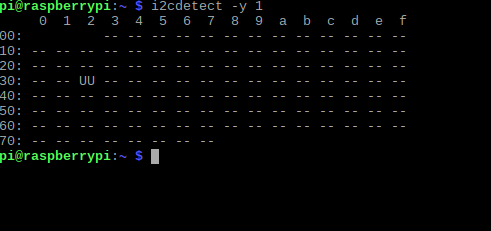
�@����ȍ~�͐ݒ肪�s�v�ɂȂ�܂��B
�@�@ RaspberryPI* �� I2C�ʐM���w�L���x�ɂ��Ă���
�@�A �wmodprobe rtc-rv8803�x�ƃR�}���h�����s
�@�B �wsudo bash
�@�@�@echo rv8803 0x32 > /sys/class/i2c-adapter/i2c-1/new_device�x
�@�@�ƃR�}���h�����s
�@�C HWCLOCK �ɐݒ肳��Ă��邩�̊m�F
�@�@�B�̂��Ɓwsudo i2cdetect -y 1�x�̃R�}���h (I2C�̐ڑ��m�F�j�ɂ� 0x32�A�h���X��
�@�@"UU"�̕\�����o�Ă���� RV-8803-C7 �� HWCLOCK �ɐݒ肳��Ă��܂��B
�@�i �wsudo hwclock -r �x�̃R�}���h��RTC�����̎�����Ԃ��Ă��܂� �j
�@�@
��x�ł� HWCLOCK �ɐݒ肳�ꂸ "32" �ƕ\������Ă��܂��ꍇ������܂��B
�@�@���̏ꍇ�͍ēx�A�B�̃R�}���h���J�Ԃ����s���Ă��������B
���̓s�x�ݒ���s�����@�ł́A�d���I�t���čċN�������ۂɍēx�����ݒ���s���K�v������܂��B
�� ����m�F���� RaspberryPI* �̃o�[�W�������̏��
| �n�[�h�E�F�A | RaspberryPi 3B |
| OS �^ Kernel | OS�o�[�W���� = Devian 11.7�^ Kernel�o�[�W���� = 6.1.21-V7+�@(�ŏI�m�F 2023/6/5) |
| �n�[�h�E�F�A | RaspberryPi 4B |
| OS �^ Kernel | OS�o�[�W���� = Devian 11.7�^ Kernel�o�[�W���� = 6.1.21-V8+�@(�ŏI�m�F 2023/11/12) |
→ ���o�[�W������OS�Ńh���C�o�̃r���h���K�v�ȏꍇ�͂�����
�C HWCLOCK �ɐݒ��� �R�}���h���t�@�����X
(1) RV-8803-C7 �� HWCLOCK �ɐݒ肵�ARV-8803-C7 �̎��������Y�p�C(OS)�ɐݒ肷��
modprobe rtc-rv8803
sudo bash
echo rv8803 0x32> /sys/class/i2c-adapter/i2c-1/new_device
hwclock -s
�@�d�r��������̏ꍇ�͏�L�̏������݂�����ƃG���[���Ԃ��Ă��܂��B
����͏�����Ԃł� �wRV-8803-C7�x�� "�d���ቺ���o�t���O"�������Ă��邽�� �whwclock-s�x(�����ǂݍ���)�̍ۂɎ������ "����" �Ɣ��f����邽�߂ł��B�d�r������ɂ́A�܂����Y�p�C���l�b�g���ɐڑ����ăC���^�[�l�b�g�����ɂȂ��Ă����ԂŁwhwclock-w�x(������������)�����s���܂��B���̍ۂɃ��i�b�N�X�h���C�o�̓���Ŏ������̏������݂Ɠ�����"�d���ቺ���o�t���O"���N���A����܂��B ���̌�́whwclock-s�x�Ŏ������ǂݍ��߂�悤�ɂȂ�܂��B
�i���w������͊��Ɏ�����������܂�Ă��邽�߂��̃G���[�͋N���܂���j
(2) ���Y�p�C(OS)�̎����i�l�b�g���[�N�����Ȃǁj�� RV-8803-C7�ɏ�������
sudo hwclock -w
(3�jRV-8803-C7�ɐݒ肳��Ă��鎞����ǂݏo��
sudo hwclock -r
(4) RV-8803-C7 (HWCLOCK�j�̕ێ����������Y�p�C(OS)�̎����ɐݒ肷��
sudo hwclock -s
(5�jRV-8803-C7 �� ���Y�p�C(OS) �� HWCLOCK �̐ݒ肩��O���@
�@�i sudo i2c �R�}���h�Œ��ڃ��W�X�^�� �Ǎ��݁^������ �o����悤�ɖ߂��ꍇ �j
sudo rmmod rtc-rv8803
�ȉ���I2C���[�h�ł̐ݒ���e�ł��B
(6) RV-8803-C7 �� CLK�o�͂� �f�t�H���g��32.768kHz ���� 1Hz �ɕύX����
sudo i2cset -y 1 0x32 0x0d 0x08
(7) 1Hz�̐��x���J�E���^�ő��肵�āA�I�t�Z�b�g�l��ݒ肷��
�@�@���o���ɂ͓d�r������Ɋ��ɌʂɃI�t�Z�b�g�ݒ肵�Ă���܂��B
+0.952ppm ....sudo i2cset -y 1 0x32 0x2c 0x04
+0.714ppm ....sudo i2cset -y 1 0x32 0x2c 0x03
+0.477ppm ....sudo i2cset -y 1 0x32 0x2c 0x02
+0.238ppm ....sudo i2cset -y 1 0x32 0x2c 0x01
0.000ppm ....sudo i2cset -y 1 0x32 0x2c 0x00
-0.238ppm ....sudo i2cset -y 1 0x32 0x2c 0x3F
-0.477ppm ....sudo i2cset -y 1 0x32 0x2c 0x3E
-0.714ppm ....sudo i2cset -y 1 0x32 0x2c 0x3D
-0.952ppm ....sudo i2cset -y 1 0x32 0x2c 0x3C
-1.190ppm ....sudo i2cset -y 1 0x32 0x2c 0x3B
-1.428ppm ....sudo i2cset -y 1 0x32 0x2c 0x3A
-1.666ppm ....sudo i2cset -y 1 0x32 0x2c 0x39
-1.904ppm ....sudo i2cset -y 1 0x32 0x2c 0x38
-2.142ppm ....sudo i2cset -y 1 0x32 0x2c 0x37
-2.380ppm ....sudo i2cset -y 1 0x32 0x2c 0x36
-2.618ppm ....sudo i2cset -y 1 0x32 0x2c 0x35
�I�t�Z�b�g�̕���\�� �w 0.238ppm �x �ł��B
�}�C�i�X�̏ꍇ�̓}�C�i�X�ɐݒ肵�܂��B
�Ⴆ�� 1Hz�̑���l�� �w0.999999750Hz�x (-0.25ppm) �@�������ꍇ�́A
sudo i2cset -y 1 0x32 0x2c 0x3F
�Ɛݒ肷��� �w1.000000Hz�x ���傤�ǂɋ߂��l�ɐݒ肳��܂�
�i���̒l�̓��Z�b�g��������܂ŕێ�����܂��B�d���f��Z�b�g�ʼn�������܂��j
�A���[���A�^�C�}�A�O���C�x���g���o�A�^�C���X�^���v�Ȃǂ̊e�@�\���g�p����ꍇ�ɂ́A��UHWCLOCK �̐ݒ���O���� I2C���[�h �̏�ԂŒ��ڃ��W�X�^�ɒl����������Őݒ肵�܂��B
�@�i sudo i2cset -y 1 0x32 0x** 0x** �Ƒ���܂� �j
------------------------------------------------------------------------------
Raspberry PI �́ARaspberryPI ���c�̓o�^���W�ł��B
��������̋L�����e�̍쐬�y�� ��L��̒��ɂ���Raspberry PI���c�@�͈�؊֗^�͂��Ă���܂���B
Arduino �́AArduino LLC�����Arduino SRL�̓o�^���W�ł��B
------------------------------------------------------------------------------
�i�Ɛӎ����j
���T�C�g��̏��E�����̌f�ڂɂ͍אS�̒��ӂ��Ă���܂����A���T�C�g�Ɍf�ڂ���Ă�����E�����������p����Ē��ڂ܂��͊ԐړI�ɐ����������Ȃ鑹�Q�ɂ��Ă����Ђ͈�̐ӔC�����̂ł͂���܂���B